提供按需电动自行车和eScooters租赁的移动服务正迅速成为传统交通方式的替代选择。由于他们负担得起,方便,非常绿色,移动服务将继续增长的普及。本文介绍了在现实世界中准确跟踪eBike和eScooter位置的一些挑战和有用的解决方案。
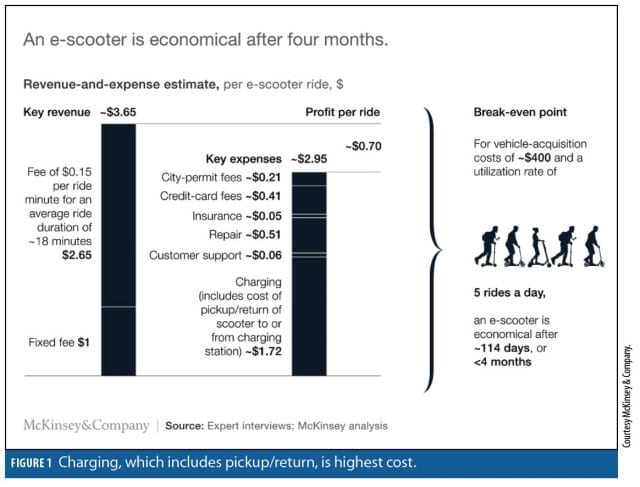
一种emobile体验的核心是自行车或滑板车的精确位置。准确的定位不仅仅是快速找到需要的自行车,而且定位的准确性也直接影响车队的运营成本。麦肯锡公司2019年的一项研究显示,充电(包括自行车或滑板车的回收和回收)是一项重要成本。让一个付费的服务团队四处寻找丢失的自行车是非常昂贵的(见图1)。
除了确定骑行车辆的位置、更换电池和维修外,遵守停车规定还需要极好的位置准确性。有一个普遍的趋势是轻型车站或停车栏是不用电的。自行车和摩托车完全依赖GNSS模块进行定位。在这里,每一米的精确度都可以用来判断一辆车是停在了一个轻型车站还是一个涂在路边的专用停车位。城市对违规停车的罚款可能是微型移动公司的一大成本。
单靠全球导航系统是行不通的
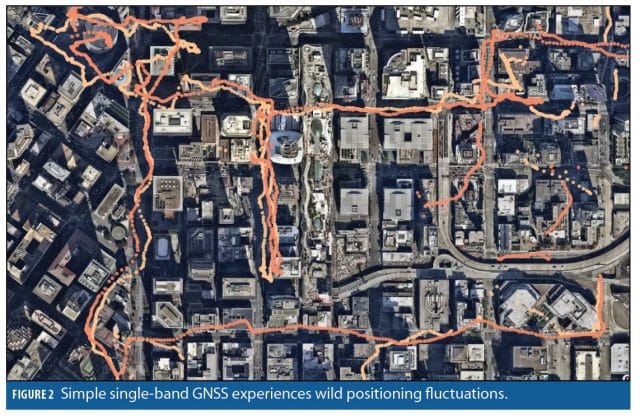
在第一想法中,添加一个GNSS接收器到eBike应该是一个简单的解决方案来定位eBike。然而,目前城市对大多数GNSS接收机并不友好。情况有多糟?100米误差在现实世界中并不少见。数据收集和显示图2,旧金山市中心,视觉上表现出地理位置的重要性,骑城市街道时的程度如何。
有三种潜在的方法可以提高位置准确性:
•双频GNSS接收器(L1 + L5或L1 + L2)
•使用惯性测量单元(IMU)进行船位推算
•GNSS校正,如实时运动学(RTK)
高端导航系统多年来利用了这些技术,因此思想在技术意义上并不新鲜。然而,实现这些技术少于10美元,并且在非常低功耗的情况下需要最新的技术。
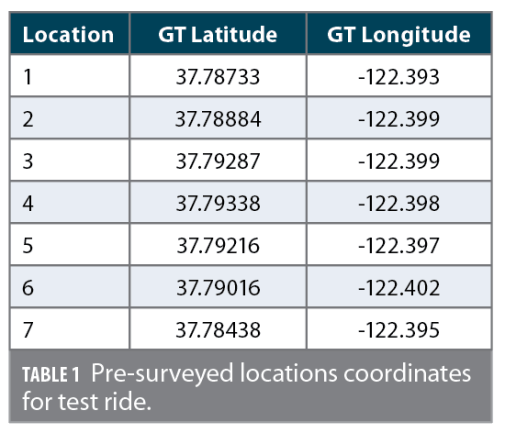
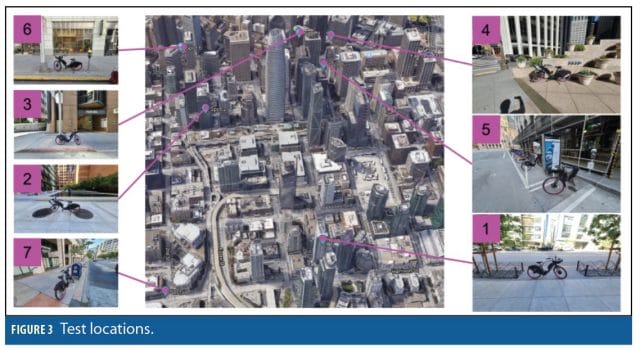
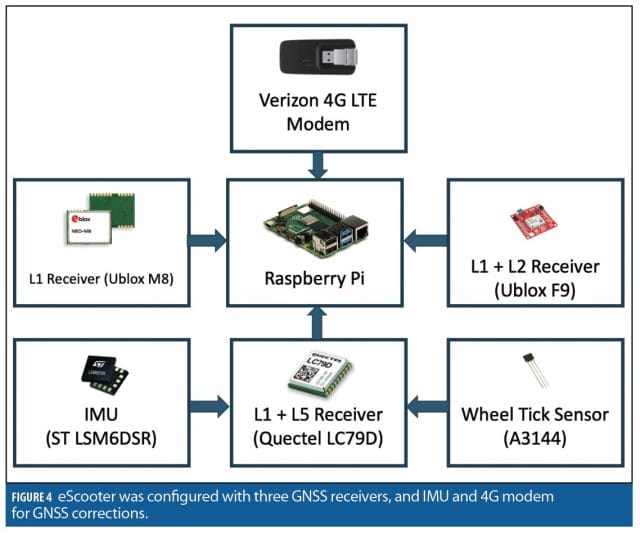
为了测试所有这些组合,一辆eScooter配置如下所示的硬件,并在旧金山市中心测试L1、L1+L2和L1+L5的各种组合。Lyft确定了七个预先调查过的、易于识别的测试地点,它们代表了现实世界的使用情况。图3给出七个地点的照片表1列出他们的纬度和纵向。
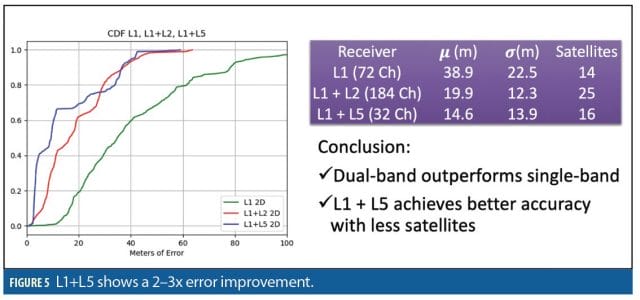
利用较新的L5 (GPS、QZSS)、E5 (Galileo)和B3(北斗)卫星信号的双频接收机可以减少多径误差。GPS L5信号和国际风味的特点是信号带宽更宽,不太容易受到多径误差的影响。也有利用L1和L2C信号的双频接收机,L2C波段的优点是充分的星座和成熟。图5显示了在与上述数据相同的测试条件下,通过迁移到一个双频接收机获得的精度提高。
图表很重要,因为它表明即使在跟踪较少的卫星(具有较低功耗的效益)时,L1 + L5接收器的准确性也显示出对替代方案的显着改进。
死亡推翻(DR)和IMU协助
然而,由于卫星计数和沉重的多径,甚至是双频GNSS甚至双带GNSS均匀的下行案例。这些是与IMU的死者来说能够真正有所帮助的情况。通过跟踪具有加速度计,陀螺仪和车轮刻度传感器的车辆,可以在设备上进行死读数和传感器融合。当没有卫星时,可以使用死者来估计,例如确定地下停车库中eBike的位置,它也可以用作滤除野外位置在狭窄的市中心街道中的多径引起的波动。
为了分析死亡率的漂移性能,考虑初始出头误差,内部测量因子误差和陀螺仪漂移率的简化模型。低成本硬件的优点的现实数据是:
•θe初始标题误差<0.8°
•ΩB.陀螺偏见<36°/ HR(0.01°/ s)
•L.e车轮刻度误差< 1%
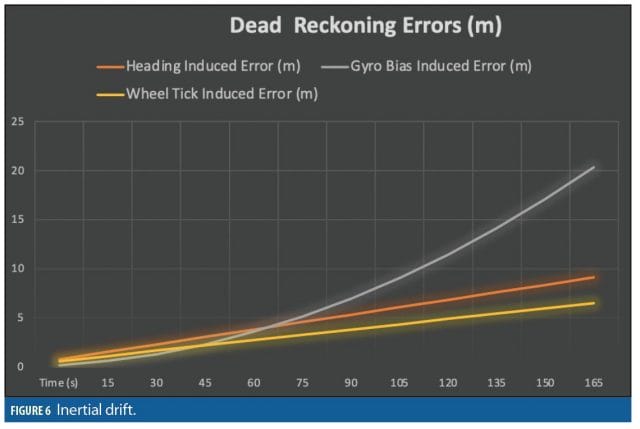
今天的消费类mems IMU芯片在恒定温度下可能提供更好的陀螺偏置不稳定性。在现实世界中,36°/Hr是一个相当典型的漂移水平。初始航向误差由GNSS速度精度驱动,在良好的天空条件下,在3-5m /s速度下,8颗以上卫星的导航精度通常为0.8度。最后,用一个简单的霍尔效应传感器很容易实现1%或更好的轮迹误差。更多的精度可以实现与编码器或霍尔传感器设置的多个滴答每转。初始航向误差和轮迹误差均导致线性误差增长,而陀螺偏差导致二次误差增长更快。
•初始标题vθet
•Z轴陀螺漂移vΩB.t2
•车轮刻度错误V L.et
在哪里v是速度和t为GNSS损失时间。
应用这些假设,我们可以看到,几米的位置可以在完全GNSS损失的情况下保持一分钟,而接近三分钟的更长的中断将开始显示由陀螺偏差驱动的更显著的漂移,这将导致额外的航向误差增长(图6)。
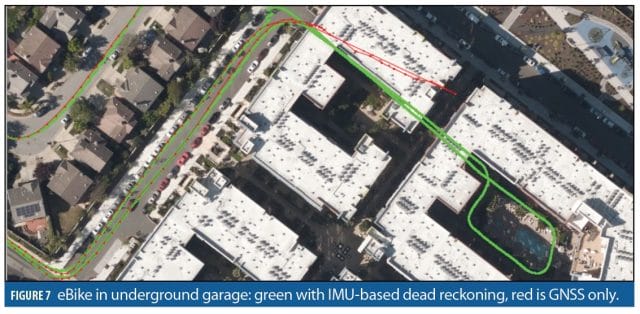
图7展示了一个骑着eBike进出地下公寓停车场的例子。从大约两分钟后离开停车场可以看出,位置校正在2米左右。
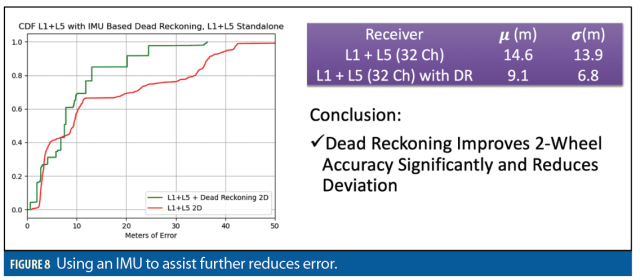
在市区环境中,航位推算可以过滤和拒绝噪声GNSS测量,使解决方案更加稳定和一致。图8显示在相同位置上,死算对解决方案性能的影响。
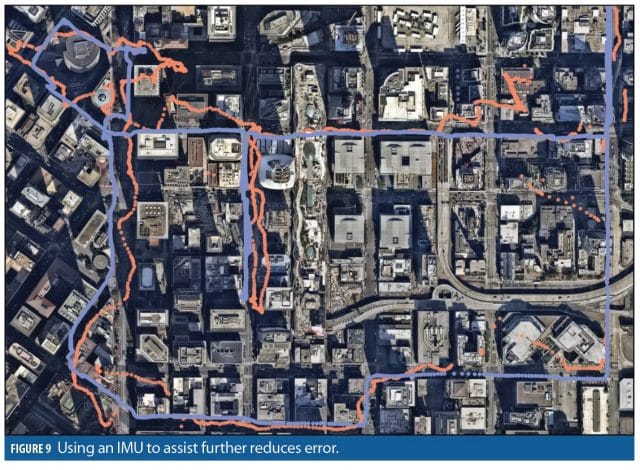
结合双频L1+L5和IMU航迹推算的弹道改进也很明显图9。
GNSS更正和RTK
GNSS卫星信号受到很好地理解的错误(时钟,轨道和大气),从根本上限制独立的位置精度到一米的最佳情况。然而,使用来自本地GNSS基站的校正或GNSS基站的网络,可以使用RTK减少到厘米级别。两种用例中存在潜在的效益:
•市中心城市峡谷
•为停车符合规定的应用程序准确地进行地形扇形beplay平台是黑网
然而,RTK无法减少多路径误差,因此不要指望市中心的城市峡谷状况厘米精度。在我们的测试中,我们在市中心环境中使用RTK看到了30%的准确性改进。具有更好天空可见性的地点的改善是最重要的。
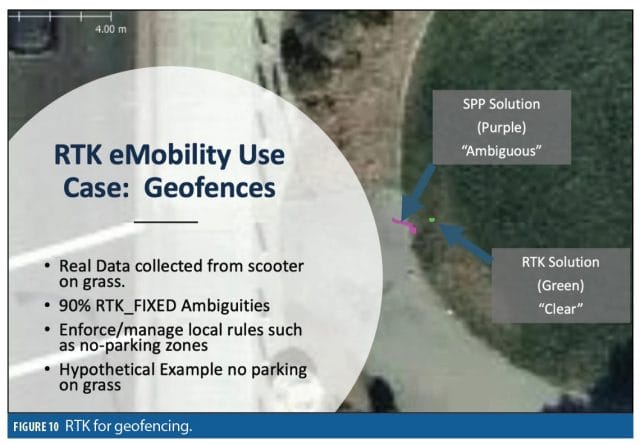
精确的地理围栏是RTK在移动应用程序中的一个极好的潜在用途。beplay平台是黑网以一个假设的例子为例,一个城市发布了当地法规,将停车限制在人行道和街道位置。在图10中,一辆摩托车停在人行道边上的草地上。RTK解决方案提供了一个清晰明确的修复。
非RTK,SPP(标准点定位)是模棱两可的。这可能导致城市官员或公民提出损害了令人损害了能力服务提供商的声誉的问题。
RTK解决方案很清晰。emobile公司可以安排将停放的自行车移到人行道上,并将违规行为通知用户。
结论
兴趣的变得越来越受欢迎,这项服务需要准确的位置和定位技术,以满足消费者需求,降低维护运营成本,并遵守新的当地法规。具有集成的DEAC-RECKONING和RTK的双频L1 + L5接收器提供了有效的解决方案,以通过传统的L1在传统的L1上提高高度级别的精度。
制造商
低成本的多波段多星座GNSS接收器最近出现在Synaptics(以前的Broadcom)、ST Microelectronics和MTK/Aihora。这些芯片组不是现成可用的组件;然而,Quectel提供了两个方便的模块LC29和LC79利用Synaptics硅。Quectel还提供双频LG69,采用ST微电子的TeseoV (ASIL-B),更适合安全关键的4轮应用。beplay平台是黑网MTK/Aihora的AG3335双频硅目前还不能作为模块提供,但它可能会在2021年下半年开始更频繁地出现。
作者

麦克霍顿他是Crossbow Technology的创始人兼首席执行官,专注于物流/资产跟踪和军事应用的跟踪设备和惯性导航系统;beplay平台是黑网被穆格收购后,他继续担任穆格的高管。他当时是ACEINNA的首席技术官,负责低成本和开源硬件/软件平台,OpenIMU平台,用于惯性导航和GNSS/INS的精确定位在广泛的自主应用,包括汽车,无人机和农业设备。beplay平台是黑网他目前是独立顾问和投资者。他拥有加州大学电气工程硕士学位。

Jens Windau是Lyft的自行车和滑板车的硬件数据科学家。他也是AirObotics和Winrobotics的创始人兼首席执行官。他有一个博士学位。来自南加州大学的计算机科学。