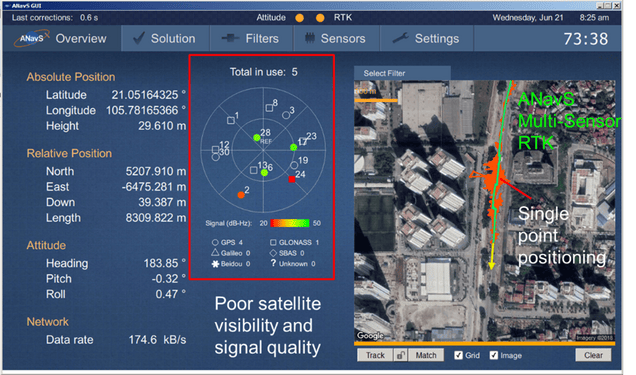
Anavs在最近的国际VDI会议自动卡车虚拟会议上展示了其多传感器RTK定位模块,其模块化和可灵活的可配置传感器融合软件。产品目标自主导航,机器人和自动化,无人机航空公司(无人机),测量,水文和提供实时高精度地图。
硬件 - 软件组合在任何位置和环境下提供精确的位置,速度和高度信息,以及具有语义信息的地图。传感器融合将原始数据从多达3个多功能,多GNSS接收器,惯性测量单元(IMU),控制器区域网络(CAN)接口,用于获取轮内径测量,相机和LIDAR。此外,利益RTK和PPP算法和LIDAR点云的基于语义分割的人工智能(AI)用于数据处理。
GNSS / INS / ODO紧密耦合RTK定位在ANAVS多传感器模块内进行。在NVIDIA Jetson Agx Xavier上执行Anavs Camera / LIDAR同时定位和映射(SLAM)和基于深度学习的语义分割。从相机/ LIDAR SLAM获得的姿势信息被馈送到多传感器RTK模块中,即使在没有GNSS信号接收的环境中,也可以获得精确的姿态信息,例如,在车库或隧道中。
Anavs位于德国慕尼黑。几家德国汽车供应商使用ANAVS产品来帮助开发先进的驾驶员援助系统(ADAS),自动驾驶,或简单地作为定位的参考系统。