基于多天线载波相位差分GNSS (CDGNSS)的位姿(位置和方向)估计,辅助单目视觉测量和智能手机级惯性传感器构成了微飞行器系统的核心。它可广泛应用于低成本、轻量化、高精度的地理参考位姿估计。
James E. Yoder,Peter A. Iannucci,Lakshay Narula和Todd E. Humphreys
奥斯汀的德克萨斯大学辐射辐射实验室
m微型飞行器(MAVs)正越来越多地用于3D绘图等应用,这两方面都需要:beplay平台是黑网
•相对于固定在地球表面的全球坐标系的精确姿态(位置和方向)知识
•近距离机动,以确保高分辨率的区域被绘制。
全局坐标系对于自动基础设施检查,建筑物,灾难恢复或搜索和救援和开放世界虚拟现实的应用等应beplay平台是黑网用是必不可少的,其中来自MAV的映射数据被其他,可能的自动化,可能的代理(可能)初始映射过程后长。
载波相位差分GNSS (CDGNSS)技术,如实时运动学(RTK)定位,可以提供厘米精度的定位精度,因此是全球参考位姿估计的优良锚定。然而,只有当所谓的载波相位歧义被解决为整数值时,这种精度才会稳健性和瞬间性地实现。确定的模糊度分辨率取决于参与的低多径GNSS信号的大量(例如12+),或严格的事先位置估计。但当测绘微型飞行器经过建筑物附近、悬垂的屋顶下或树叶周围时,GNSS信号阻塞和多路径效应变得严重,限制了CDGNSS在无惯性传感辅助下的可用性。因此,绘制地图的MAVs用户目前倾向于完全避开GNSS信号可能受阻的地区。
MAV平台还在导航系统上奠定了唯一的约束:船上计算受大小,重量和功率限制的限制;MAV的生动系统动态需要低延迟测量和估计;并且,在许多情况下,MAVS只能具有低成本的消费级摄像机和惯性测量单元(IMU)。
本文介绍了一种通过与视觉惯性姿势估计器的紧密耦合来改善CDGNSS性能的方法。如果后者辅助解析CDGNSS整数含量,则在此定义CDGNSS系统与视觉和惯性感测紧密耦合。相比之下,一个松散耦合的CDGNS系统基于独立的CDGNSS估计,其在不受其他传感器的情况下运行。松散耦合系统中的信息仅将一种方式从CDGNSS估计器流到下游估计器。
尽管通过限制动态传播中的不确定性,但是,尽管通过限制了动态传播中的不确定性,但是可视化和惯性测量使得能够稳健运行,这改善了天空可见度有限的区域内的固定整数CDGNS可用性和可靠性。
在将视觉测量与智能手机级惯性传感相结合时,没有先前的工作证明了CDGNSS整数固定率的提高。中心姿态估计滤波器接收来自独立CDGNSS位置和姿态估计器的测量值,基于Bloesch提出的ROVIO测量模型的视觉特征测量值等等。和惯性测量。过滤器的姿势估计作为CDGNS整数修复之前的产品被反馈。模拟和现实世界GNSS降级下的性能分析表明,视觉测量大大提高了低成本惯性辅助CDGNSS姿势估计的可用性和准确性。
本文的主要贡献是使用智能手机级IMU和相机将视觉测量整合到一个多天线cdgnss -惯性姿态估计器中。据作者所知,本文首次演示了使用智能手机级传感器的视觉惯性辅助提高RTK整数固定率。
平台,坐标框架,符号
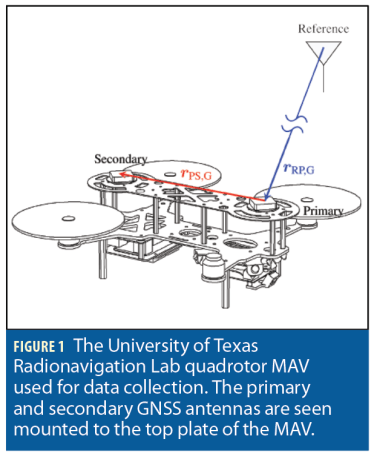
参考MAV平台(图1),是一个二级电路MAV,具有两个低成本的L1-only GNSS天线,连接到自定义GNSS前端。前端提供由在MAV上运行的高级软件定义的GNSS接收器处理的原始中频(IF)样本。软件定义的GNSS接收器为GPS,伽利略和基于卫星的增强系统(SBAS)星座提供GNSS可观察。图像由30 Hz运行的单眼640×480全球快门的相机收集。与GNSS Frontent集成的智能手机级MEMS IMU(博世BMX055)提供了与GNSS接收器采样时钟的硬件时间戳的惯性测量。两个GNSS天线被称为主和次级天线。
测量和估计参考以下坐标系:
G:WGS-84地球中心固定(ECEF)框架。
W:“World”框架,一种固定在地球表面并以RTK参考天线的相位中心为中心的准惯性East-North-Up (ENU)框架。
B:“身体”框架,以主要的GNSS天线的相位中心为中心并固定到四轮压力机主体。
你:“IMU”框架,以IMU的加速度计Triads为中心,并固定在四轮压积机身体上。
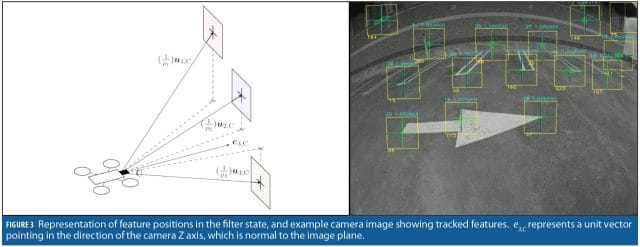
C:“相机”框架,以相机的光学中心为中心。它的X和Y轴与相机焦平面上的X和Y像素轴对齐,它的Z轴向外指向相机视图的中心。
联邦估计架构
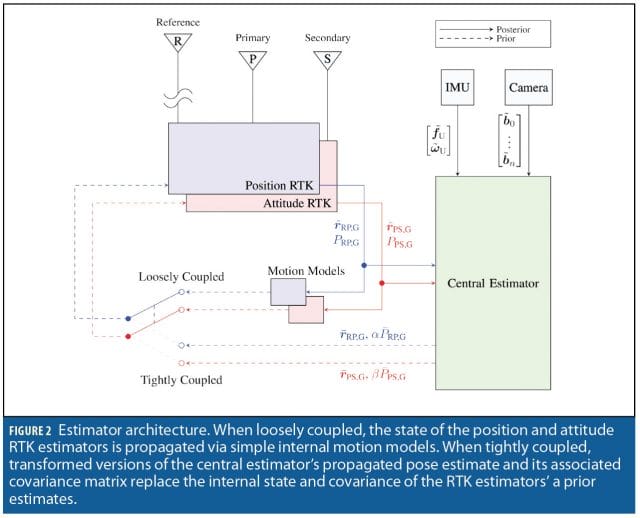
这项工作探讨了离散RTK估计与包含视觉惯性测量的中心姿势估计器的耦合。中央姿势估计器被实现为无容的卡尔曼滤波器(UKF)。如图所示图2,中央估计器从智能手机级IMU,单目相机和两个独立的单基线RTK估计接收测量值,称为位置和态度RTK估计。位置RTK估计器在MAV主GNSS天线之间产生单个基线RTK解决方案,以及具有预测位置的固定参考天线。态度RTK估计器在MAV的主GNSS天线之间产生RTK解决方案,其被两个天线之间的已知基线长度约束。
在松散耦合模式下操作时,rTK估计值是统计的;也就是说,它们为中心姿势估计器提供位置和姿态测量,但不会摄取任何惯性或视觉测量以帮助产生RTK解决方案。
When operating in the tightly-coupled mode, the central estimator’s output is taken as the prior for the RTK estimators: transformed versions of the central estimator’s propagated pose estimate and its associated covariance matrix replace the internal state and covariance of the RTK estimators’ a priori estimates. In this way, the central pose estimator provides a prior constraint on the RTK solutions, aiding the integer ambiguity resolution process.
这种联合架构,其中离散估计器来回通过数据,与估计性能和一致性相比,与直接采用GNSS伪距和载波相位可观察的“一体化”姿势估计滤波器相比,其一致性是次优。将RTK估计与中央姿势估计风险播种引入姿势估计器状态误差与从RTK估计的测量中的测量中的错误之间引入未铭刻的相关性。然而,与双差分载波相位测量值相比,这种“循环推断”减轻了与姿势估计的现有位置的抽取级精度相比是精确的。这种精确不对称意味着,当调节正确整数的含量时,RTK估计器的解决方案错误是由载波相位多径的主导,这与姿势估计器的状态错误不相关。在实践中,精确的不对称通过缩放来放大先验协方差矩阵P.RP,G.和P.PS, G由位姿估计器发送到具有标量膨胀因子α和β的RTK估计器(见图2)。
当双差载波相位测量数降至3以下时,整数条件诱导的去相关失效,此时仅通过GNSS测量就真正无法观测到三维位置状态。当这种情况发生时,返回的测量值只包含来自先验沿任何不可观测方向的信息,导致估计值不一致。为了避免这种情况,姿态估计器不摄入少于3个双差测量值的RTK测量值。这种限制在实际中影响可以忽略不计,因为一个或两个双差测量的情况通常是瞬态的;视觉惯性定位很容易覆盖缝隙。
当然,如果不正确地解决了歧义,RTK解决方案误差和位姿估计器状态误差之间就会建立很大的相关性。因此,从本文的联邦紧密耦合方案中提取良好的性能需要仔细的孔径测试来验证候选CDGNSS整数补丁。整定逻辑采用分层的信号选择方法、基于伪奥兰治的创新测试和受控固定失败率整定接受测试。
联邦评估体系结构虽然不是最优的,但具有易于实现和诊断的优点,并且可以利用现有的经过良好测试的RTK评估器。此外,它还可以在松耦合和紧耦合之间进行切换,如图所示图2,这样可以方便地检查紧耦合的好处。最后,与松散耦合相比,它成功地交付了令人印象深刻的结果,这将被展示出来,并为将来在更完整的紧密耦合方面的工作提供了有价值的踏脚石。
CDGNSS估算器
两个独立的RTK解决方案由RTK估计器维护:一个位置解决方案,R.RP,W.表示一个从固定RTK参考站指向MAV主GNSS天线的矢量,以及一个姿态解决方案,R.PS,W.表示从MAV主机指向其辅助地板GNSS天线的向量,该天线提供全局参考的音高和偏航信息。姿态解决方案被限制为已知的基线长度,其在GNSS L1频率上大约一个波长。
拥有两个独立的RTK估计值是次优,因为它们不会因两种RTK基线中的共享天线而导致的测量中的相关性。然而,独立的RTK估计值更简单地开发和维护,并且每个RTK估计器的配置参数,例如高度掩码,整数孔径测试阈值和异常值排除参数,可以独立调整,这是有益的作为基线约束态度估计器允许对等效固定性能的大量放松阈值。
离群值被拒绝。城市环境中的多路径和绕射效应导致GNSS可观测值频繁损坏。两层策略可以缓解这些异常值。首先,应用一组启发式方法来筛选传入的可观察对象,并过滤掉可能是异常值的测量值。这种筛选应用了载波噪声比阈值、最小卫星仰角和由GNSS测量引擎计算的锁相统计量。未通过此筛选的测量值将被丢弃。接下来,该过滤器对每批传入的双差测量值应用χ2类型创新测试。如果测试失败,或者歧义解析失败,则在排除单个度量时,迭代地重新尝试解决方案。该方案在实际城市定位测试中表现良好。
整数消除歧义。在每个测量历元,一个实值(浮动)的解决方案首先尝试的基础上的位置先验滤波器状态和双差伪距测量。在松散耦合模式下,这个位置先验是通过使用一个简单的接近恒定速度的运动模型从以前的RTK估计解传播的。在紧耦合模式下,这个位置先验是从中心姿态估计器的状态中提取出来的。
接下来,尝试使用整数最小二乘(ILS)进行整数模糊度分辨,并通过具有预定失败定位率的整数孔径测试进行验证。对于姿态RTK估计器,已知的两天线之间的基线长度作为盲降搜索过程中的附加约束。
RTK估计器应用单纪元整数歧义解析策略。在每个测量时期,在执行ILS解决方案之后,在浮动解决方案的情况下或通过在固定解决方案的情况下通过在整数状态下调节rTK估计器状态的整数组件。这使得估计器对周期的循环滑块不敏感,这对于在城市环境中实现高rtk可用性和可靠性的关键性,当信号劣化和中断极其频繁时。
中央姿势估计
中心位姿估计器被实现为UKF。在测量更新步骤中输入位置和姿态RTK解决方案和跟踪视觉特征的像素强度测量,并应用IMU角速率和比力测量将滤波状态及时向前传播。
这里省略了来自原始会议纸的详细部分,以获得空间原因。要访问它,请参阅最后的确认部分。本节涵盖过滤器概述和状态参数化,IMU偏置扇区,视觉扇区,IMU测量,状态传播,刚体扇区,CDGNSS测量,视觉测量和异常排除。它定义了多个变量并包含一系列方程。
实验结果与分析
以下小节分析了系统在包含模拟和真实GNSS测量退化的数据集上的性能。对于下面介绍的每一个数据集,系统以四种模式运行,在图和表中描述,缩写如下:
LC I:松散耦合模式,仅具有RTK和惯性测量;
LC V +我:与RTK、视觉和惯性测量松散耦合;
Tc I:仅与RTK和惯性测量紧密耦合;
TC v + I:与RTK、视觉和惯性测量紧密耦合。
模拟GNSS降级
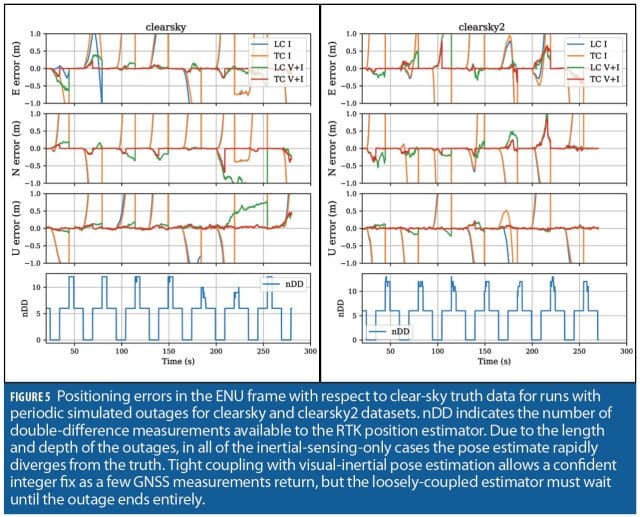
对于此处的结果,来自MAV的传感器的数据从一个区域收集,具有清晰的天空。这些运行的松散耦合的RTK和惯性姿势解决方案被视为“真理”,因为它们具有大量高质量的双差别测量,具有高整数光圈测试统计。接下来,在处理流水线中引入人造GNSS信号中断,临时排除来自处理的一些或所有接收的GNS信号。这些人工中断用于评估系统的定位精度和在降解的GNSS条件下保持RTK固定的能力。中断模式,大致模拟闭塞结构的段落,由10秒限制为6个双差别测量,10秒的零测量,另外10秒的限制为6测量,然后重复之前没有降级5秒。
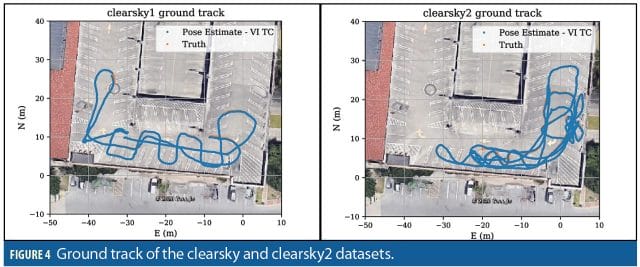
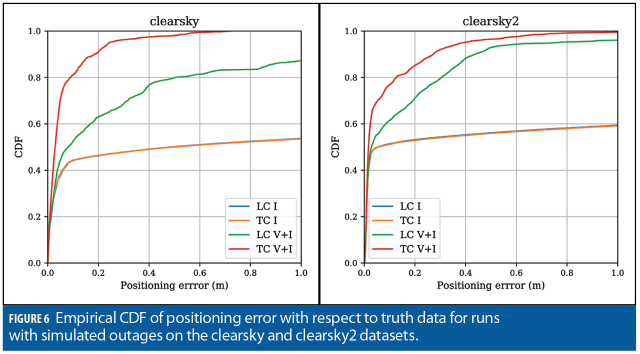
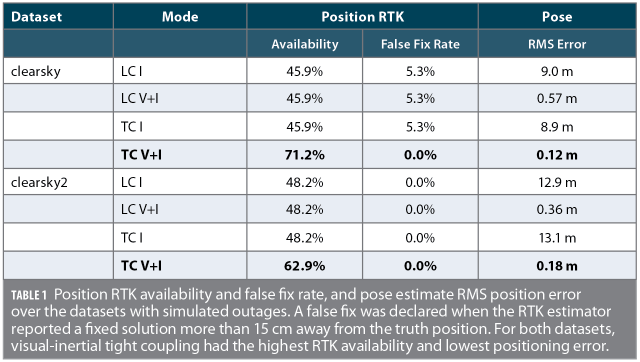
在clearsky和clearsky2数据集上以四种不同模式运行姿态估计系统。clearsky数据集的特点是平缓运动,速度限制在1.0米/秒,沿任何轴,角速率限制在45°/秒。clearsky2数据集具有更快速的运动和急转弯,速度可达2.0米/秒,角速率可达100°/秒。图5.在两个数据集中的这些模拟降级期间,在四种模式下显示所得定位误差;图6.显示相应的定位误差的经验CDF。
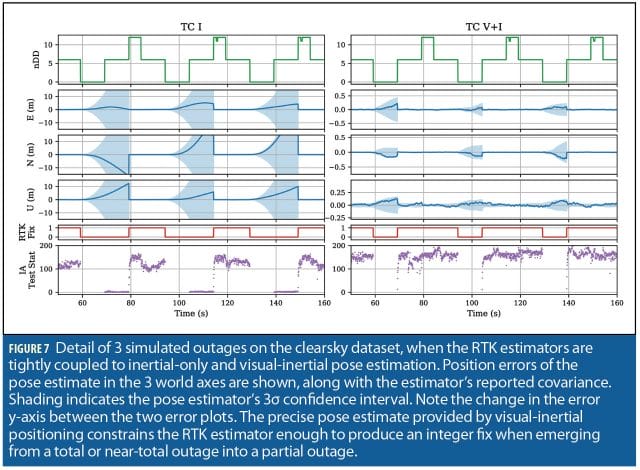
这种类型的GNSS损害——部分中断,然后是完全中断,然后是部分中断——清楚地展示了视觉-惯性紧密耦合的优势,如在图7。甚至是智能手机级IMU的惯性姿势传播是完美的,可以提供厘米级精确的姿势,其达到一秒钟的一部分的Δ,这有助于在具有尖锐的天线运动期间保持在劣化条件下的固定。但是,一旦RTK修复丢失,由于完全中断,由多路径损坏的测量集或可见卫星的突然移位,IMU的位置估计迅速降低,并且在不再几秒钟之后为RTK整数模糊分辨率提供有用的约束。然后,只有IMU的系统必须等待足够的(并且通常大的)卫星在能够自信地提供RTK修复之前重新计量。相反,视觉惯性姿势估计器通常能够在中断期间无限期地保持厘米精度,因为其漂移主要由行进的距离而不是经过的时间来确定。从中断进入仍然降级的GNSS条件后,视觉惯性估计器通常仍然具有足够强大的位置约束,以提高RTK修复成功率。
在这两种模拟故障数据集,紧耦合visual-inertial估计通常是能够保留整数修复在完全停机后的部分中断,而松耦合和IMU-only估计无法实现整数修复,直到模拟退化完全结束。与其他模式相比,这导致了整数固定率和紧耦合视觉惯性估计器定位精度的大幅提高,如下图所示图6。
现实世界测试
接下来,在具有悬空屋檐的建筑旁边的停车场屋顶上,通过几次试验收集了来自MAV上传感器的数据,这些数据是在具有挑战性的真实世界GNSS条件下进行的。
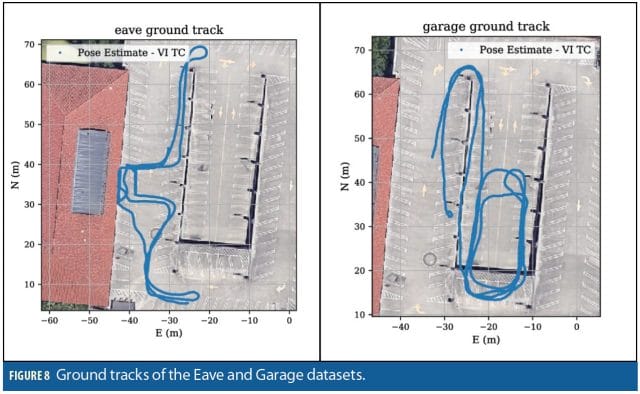
在EAVE数据集中,流动站从一个区域开始了几次,在屋檐下方的明确看法,造成除了几个GNSS信号之外的所有内容,然后返回到一个清晰的天空视图的区域。在车库数据集中,流动站使几个环绕在一个区域之间的区域,其中一个区域妨碍了天空的视野和悬垂停车库结构覆盖的区域,这诱导基本上总GNSS中断。此数据集另外为视觉惯性导航提供了挑战,由于进入和留下悬垂车库的阴影时遇到的大对比度变化。两个数据集的地面轨道显示在图8。
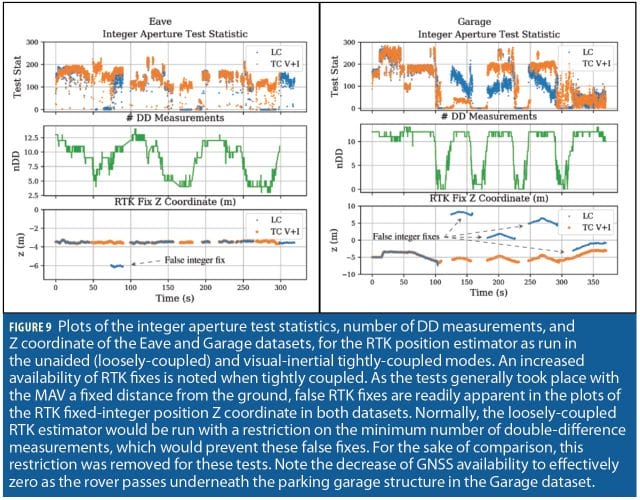
两个数据集都在充满挑战的GNSS环境中进行。由于在这些数据集中缺少清晰的天空视图,因此没有真相参考。因此,通过与估计器内部一致性有关的度量分析它们。表我显示了固定整数RTK位置解决方案的可用性,另外通过了中心姿态估计器创新测试。在所有只使用惯性的情况下,在定位输出中可以看到错误的RTK整数修复。在松散耦合的情况下,当添加视觉测量时,可用性降低,这是因为中心姿态估计器通过创新测试拒绝这些错误的整数修正的能力增加了。在这两个数据集中,当RTK估计器以视觉惯性紧密耦合模式运行时,整数固定率大大增加。
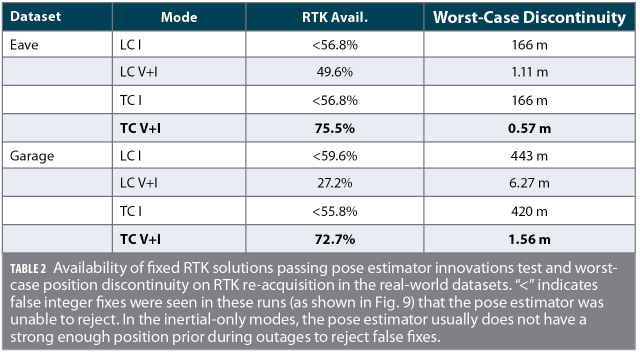
表格1显示在每次运行中,在停机后重新获取创新接受的RTK位置修复时发生的最大位置跳变。假设RTK整数状态在重新采集时已经被正确地固定,这是RTK中断过程中无辅助姿态估计器漂移的有效度量。在车库和屋檐数据集中,由于具有挑战性的GNSS环境,所有4种滤波模式都发生了多秒RTK修复中断。当仅使用智能手机级IMU时,这些中断时间往往太长,使得姿态估计器无法提供有用的位置估计。相比之下,当姿态估计器允许视觉测量时,在这些中断过程中,几乎在每个情况下都保留了亚米精度。当估价器在紧耦合模式下运行时,这个额外的约束允许在停机结束时更早地进行RTK修复,此时可用的双差测量更少,从而提高了整体解决方案的准确性。
在车库数据集中,除了紧耦合的视觉惯性定位外,RTK位置估计器在所有运行中都花费了大量时间进行不正确的整数修正。对于除了紧耦合视觉惯性以外的所有模式,基于DD测量数量的启发式方法通常会阻止在这些条件下尝试整数修复。为了在可用度量很少的环境中进行公平比较,这些测试禁用了这个限制。当仅使用IMU时,由于累积的位置不确定性,姿态估计器无法自信地拒绝这些假定位,姿态估计会收敛到错误的RTK位置。当在与视觉测量的松散耦合模式下运行时,位姿估计器正确地拒绝了错误固定的RTK位置测量,因为它失败了位姿估计器的创新测试,但遭受了增加的里程数漂移,因为它因此花费了更多的时间没有有效的RTK测量。相反,当在与视觉测量紧密耦合的模式下运行时,先前由视觉惯性姿态估计提供的增强位置允许RTK估计器产生正确的固定位置测量,提供更高的RTK可用性,从而提高定位精度。
结论
多天线载波相位差分GNSS(CDGNS)位置和方向(姿势)确定系统使用来自智能手机级惯性传感器的摄像机图像和测量来帮助整数模糊分辨率解决过程通过之前提供姿势。性能测试显示,将视觉测量结合到紧密耦合的惯性CDGNS系统中对于维持足够精确的姿势估计准确是至关重要的,以便在完全或接近完整的GNSS测量中断时出现时足以支持整数。
致谢
这项工作得到了德克萨斯大学无线网络和通信集团(WNCG)的部分支持,部分由陆军研究办公室合作协议W911NF-19-2-0333。本文件中所载的观点和结论是作者的观点和结论,不应被解释为代表陆军研究办公室或美国政府的官方政策,无论是表达还是暗示。美国政府被授权为政府目的繁殖和分发转载,尽管本文有任何版权符号。
本文基于ION GNSS + 2020呈现的纸张;完整的原始版本可以在ion.org/publications/browse.cfm.。
作者

詹姆斯•尤德是德克萨斯大学奥斯汀航空航天工程和工程力学系的研究生,以及犹他州的UT RadionAvigation实验室。

彼得A. Iannucci.他是德克萨斯大学奥斯汀分校无线电导航实验室的博士后研究员,也是UT无线网络和通信小组(WNCG)的成员。

Lakshay Narula.是德克萨斯大学奥斯汀分校的博士生,也是德克萨斯大学无线电导航实验室的研究生研究助理。

Todd Humphreys.是奥斯汀德克萨斯大学航空航天工程与工程力学系的副教授,他指导了RadionAvigation实验室。他掌握了一个博士学位。康奈尔大学航空航天工程。